
 目标跟踪技术是机器人视觉领域的一个重要研究分支,它融合了图像处理、模式识别、人工智能及自动控制等多学科最新研究成果,主要利用视频分析方法对视频输入图像序列进行连续分析,来实现运动目标的自动检测、定位和跟踪,为高层视频对目标的行为理解和决策提供底层对象和分析依据。
目标跟踪技术是机器人视觉领域的一个重要研究分支,它融合了图像处理、模式识别、人工智能及自动控制等多学科最新研究成果,主要利用视频分析方法对视频输入图像序列进行连续分析,来实现运动目标的自动检测、定位和跟踪,为高层视频对目标的行为理解和决策提供底层对象和分析依据。 在需要监控的环境里,如何能够判断出进入特定区域的目标,并且能够跟踪目标的轨迹。分为两种情况:一是静态背景下的目标跟踪;二是动态背景下的目标跟踪。
一、静态背景下的目标跟踪方法
1、单目标:目标跟踪还可以分为单目标的跟踪和多目标的跟踪。单目标的静态背景下的目标跟踪指的是摄像头是固定在某一方位,其所观察的视野也是静止的。通常采用背景差分法,即先对背景进行建模,然后从视频流中读取图像(我们称之为前景图像),将前景图像与背景图像做差,就可以得到进入视野的目标物体。对于目标的描述,通常用目标连通区域的像素数目的多少来表达目标的大小,或者用目标区域的高宽比等。目标的位置信息可采用投影的方式来定位。
2、多目标:静态环境下的多目标跟踪,需要确定每个目标的特征,位置,运动方向,速度等信息。
3、预处理:由于获得的图像总会有着噪声,需要对图像做一些预处理,如高斯平滑,均值滤波,或者进行一些灰度拉伸等图像增强的操作。
二、动态背景下的目标跟踪
摄像头在云台控制下的旋转,会使得他所采集的图像时可在变化,所以,对于整个目标跟踪过程来说,背景是变化,目标也是在整个过程中运动的,所以跟踪起来较有难度。
目前课题组提出的方案是:跟踪过程:在摄像头不同偏角情况下取得若干背景图片,建立背景图片库DD>摄像头保持固定时,取得当前帧图片,与图片库中的背景图像匹配,背景差分(灰度差分?),获得目标DD>目标特征提取DD>实时获得当前帧图片,采用跟踪算法动态跟踪目标。
提取特征是一个难点,课题组提出多颜色空间分析的方法。根据彩色图像在不同的颜色空间里表征同一物体呈现出的同态性,可以把目标物体在不同的颜色空间里进行分解,并将这些关键特征信息进行融合,从而找出判别目标的本质特征。
跟踪过程中采用的各种方法说明:
1)在0-360度不同偏角时,获得背景图片,可进行混合高斯背景建模,建立图片库,以俯仰角和偏转角不同标志每张背景图片,以备匹配使用;
2)背景差分获得目标后,对差分图像需要进行平滑、去噪等处理,去除干扰因素;
3)对目标采用多颜色空间(HSV、YUV)特征提取,对不同颜色空间的特征相与(AND),得到目标特征,以更好的在当前帧图片中找到目标;
4)实时得到的当前帧图片,进行混合高斯建模,排除树叶摇动等引起的背景变化;
5)跟踪算法可采用多子块匹配方法、camshift方法等。
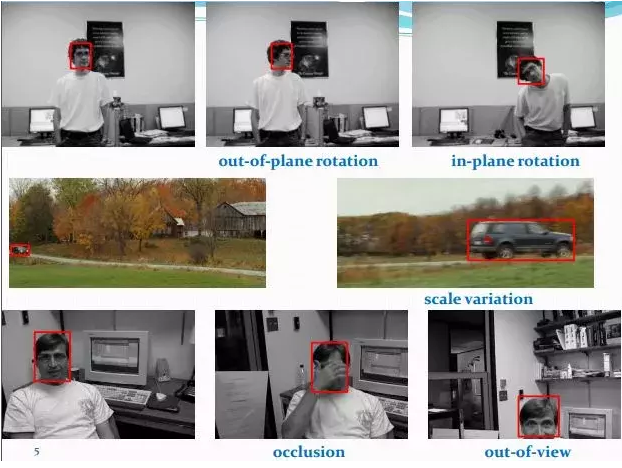
通常目标跟踪面临几大难点(吴毅在VALSE的slides):外观变形,光照变化,快速运动和运动模糊,背景相似干扰:平面外旋转,平面内旋转,尺度变化,遮挡和出视野等情况:
目标视觉跟踪(VisualObjectTracking),大家比较公认分为两大类:生成(generative)模型方法和判别(discriminative)模型方法,目前比较流行的是判别类方法,也叫检测跟踪tracking-by-detection,为保持回答的完整性,以下简单介绍。
该文观点仅代表作者,本站仅提供信息存储空间服务,转载请注明出处。若需了解详细的安防行业方案,或有其它建议反馈,欢迎联系我们。
