
【安防在线 www.anfang.cn】人工智能是一门极富挑战性的科学,从事这项工作的人必须懂得计算机知识,心理学和哲学。人工智能是包括十分广泛的科学,它由不同的领域组成,如机器学习,计算机视觉等等,总的说来,人工智能研究的一个主要目标是使机器能够胜任一些通常需要人类智能才能完成的复杂工作。但不同的时代、不同的人对这种“复杂工作”的理解是不同的。 在了解人工智能之前我们需要对机器人的是如何工作的原理进行一定的了解,下面跟着锐驰机器人小编一起来学习下!
机器人是如何工作的
英语里“机器人”(Robot)这个术语来自于捷克语单词robota,通常译作“强制劳动者”。用它来描述大多数机器人是十分贴切的。世界上的机器人大多用来从事繁重的重复性制造工作。它们负责那些对人类来说非常困难、危险或枯燥的任务。


最常见的制造类机器人是机器臂。一部典型的机器臂由七个金属部件构成,它们是用六个关节接起来的。计算机将旋转与每个关节分别相连的步进式马达,以便控制机器人(某些大型机器臂使用液压或气动系统)。与普通马达不同,步进式马达会以增量方式精确移动。这使计算机可以精确地移动机器臂,使机器臂不断重复完全相同的动作。机器人利用运动传感器来确保自己完全按正确的量移动。
这种带有六个关节的工业机器人与人类的手臂极为相似,它具有相当于肩膀、肘部和腕部的部位。它的“肩膀”通常安装在一个固定的基座结构(而不是移动的身体)上。这种类型的机器人有六个自由度,也就是说,它能向六个不同的方向转动。与之相比,人的手臂有七个自由度。
人类手臂的作用是将手移动到不同的位置。类似地,机器臂的作用则是移动末端执行器。您可以在机器臂上安装适用于特定应用场景的各种末端执行器。有一种常见的末端执行器能抓握并移动不同的物品,它是人手的简化版本。机器手往往有内置的压力传感器,用来将机器人抓握某一特定物体时的力度告诉计算机。这使机器人手中的物体不致掉落或被挤破。其他末端执行器还包括喷灯、钻头和喷漆器。
工业机器人专门用来在受控环境下反复执行完全相同的工作。例如,在焊锡的领域 ,传统的人工焊锡不但效率不高,而且焊锡过程会产生对人体有害的起来,利用自动焊锡机就可以很好的解决这些问题,不但可以提高焊锡的效果 ,成本也会得到相应的减少。对于企业的发展是很有必要的。
机器臂是制造汽车时使用的基本部件之一

大多数工业机器人在汽车装配线上工作,负责组装汽车。在进行大量的此类工作时,机器人的效率比人类高得多,因为它们非常精确。无论它们已经工作了多少小时,它们仍能在相同的位置钻孔,用相同的力度拧螺钉。制造类机器人在计算机产业中也发挥着十分重要的作用。它们无比精确的巧手可以将一块极小的微型芯片组装起来。
机器臂的制造和编程难度相对较低,因为它们只在一个有限的区域内工作。如果您要把机器人送到广阔的外部世界,事情就变得有些复杂了。
首要的难题是为机器人提供一个可行的运动系统。如果机器人只需要在平地上移动,轮子或轨道往往是最好的选择。如果轮子和轨道足够宽,它们还适用于较为崎岖的地形。但是机器人的设计者往往希望使用腿状结构,因为它们的适应性更强。制造有腿的机器人还有助于使研究人员了解自然运动学的知识,这在生物研究领域是有益的实践。机器人的腿通常是在液压或气动活塞的驱动下前后移动的。各个活塞连接在不同的腿部部件上,就像不同骨骼上附着的肌肉。若要使所有这些活塞都能以正确的方式协同工作,这无疑是一个难题。在婴儿阶段,人的大脑必须弄清哪些肌肉需要同时收缩才能使得在直立行走时不致摔倒。同理,机器人的设计师必须弄清与行走有关的正确活塞运动组合,并将这一信息编入机器人的计算机中。许多移动型机器人都有一个内置平衡系统(如一组陀螺仪),该系统会告诉计算机何时需要校正机器人的动作。
人工智能
人工智能(AI)无疑是机器人学中最令人兴奋的领域,无疑也是最有争议的:所有人都认为,机器人可以在装配线上工作,但对于它是否可以具有智能则存在分歧。就像“机器人”这个术语本身一样,您同样很难对“人工智能”进行定义。终极的人工智能是对人类思维过程的再现,即一部具有人类智能的人造机器。人工智能包括学习任何知识的能力、推理能力、语言能力和形成自己的观点的能力。目前机器人专家还远远无法实现这种水平的人工智能,但他们已经在有限的人工智能领域取得了很大进展。如今,具有人工智能的机器已经可以模仿某些特定的智能要素。
计算机已经具备了在有限领域内解决问题的能力。用人工智能解决问题的执行过程很复杂,但基本原理却非常简单。首先,人工智能机器人或计算机会通过传感器(或人工输入的方式)来收集关于某个情景的事实。计算机将此信息与已存储的信息进行比较,以确定它的含义。计算机会根据收集来的信息计算各种可能的动作,然后预测哪种动作的效果最好。当然,计算机只能解决它的程序允许它解决的问题,它不具备一般意义上的分析能力。象棋计算机就是此类机器的一个范例。
某些现代机器人还具备有限的学习能力。学习型机器人能够识别某种动作(如以某种方式移动腿部)是否实现了所需的结果(如绕过障碍物)。机器人存储此类信息,当它下次遇到相同的情景时,会尝试做出可以成功应对的动作。同样,现代计算机只能在非常有限的情景中做到这一点。它们无法像人类那样收集所有类型的信息。一些机器人可以通过模仿人类的动作进行学习。在日本,机器人专家们向一部机器人演示舞蹈动作,让它学会了跳舞。
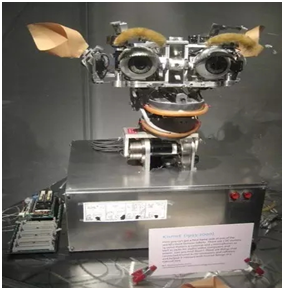
有些机器人具有人际交流能力。Kismet是麻省理工学院人工智能实验室制作的机器人,它能识别人类的肢体语言和说话的音调,并做出相应的反应。Kismet的作者们对成人和婴儿之间的交互方式很感兴趣,他们之间的交互仅凭语调和视觉信息就能完成。这种低层次的交互方式可以作为类人学习系统的基础。
Kismet机器人
Kismet和麻省理工学院人工智能实验室制造的其他机器人采用了一种非常规的控制结构。这些机器人并不是用一台中央计算机控制所有动作,它们的低层次动作由低层次计算机控制。项目主管罗德尼?布德克斯(Rodney Brooks)相信,这是一种更为准确的人类智能模型。人类的大部分动作是自动做出的,而不是由最高层次的意识来决定做这些动作。
人工智能的真正难题在于理解自然智能的工作原理。开发人工智能与制造人造心脏不同,科学家手中并没有一个简单而具体的模型可供参考。我们知道,大脑中含有上百亿个神经元,我们的思考和学习是通过在不同的神经元之间建立电子连接来完成的。但是我们并不知道这些连接如何实现高级的推理能力,甚至对低层次操作的实现原理也并不知情。大脑神经网络似乎复杂得不可理解。
因此,人工智能在很大程度上还只是理论。科学家们针对人类学习和思考的原理提出假说,然后利用机器人来实验他们的想法。正如机器人的物理设计是了解动物和人类解剖学的便利工具,对人工智能的研究也有助于理解自然智能的工作原理。对于某些机器人专家而言,这种见解是设计机器人的终极目标。其他人则在幻想一个人类与智能机器共同生活的世界,在这个世界里,人类使用各种小型机器人来从事手工劳动、健康护理和通信。许多机器人专家预言,机器人的进化最终将使我们彻底成为半机器人,即与机器融合的人类。有理由相信,未来的人类会将他们的思想植入强健的机器人体内,活上几千年的时间!无论如何,机器人都会在我们未来的日常生活中扮演重要的角色。在未来的几十年里,机器人将逐渐扩展到工业和科学之外的领域,进入日常生活,这与计算机在20世纪80年代开始逐渐普及到家庭的过程类似。
该文观点仅代表作者,本站仅提供信息存储空间服务,转载请注明出处。若需了解详细的安防行业方案,或有其它建议反馈,欢迎联系我们。
