


【安防在线 www.anfang.cn】2017年12月29日,工信部网站发布了由工信部、国家标准委共同制定的《国家车联网产业标准体系建设指南》(下称《指南》)系列文件,旨在发挥在车联网产业生态环境构建中的顶层设计和引领规范作用,并根据标准化主体对象和行业属性把指南分为总体要求、智能网联汽车、信息通信、电子产品与服务等部分。
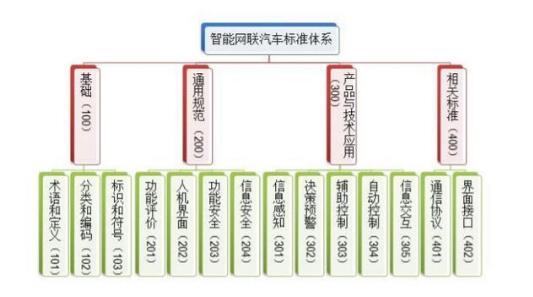
首先,《指南》规范了智能网联汽车的定义:智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(人、车、路、云端等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。具体智能网联汽车标准体系如下:
智能网联标准体系中,智能控制主要指车辆行驶过程中横向(方向)控制和纵向(速度)控制及其组合对车辆行驶状态的调整和控制,涉及发动机、变速器、制动、底盘等多个系统。根据车辆智能控制的复杂程度、自动化水平和适应工况不同,又可分为辅助控制和自动控制两类。
》发布")
辅助控制类标准覆盖车辆静止状态下的动力传动系统控制,车辆行驶状态下的横向(方向)控制和纵向(速度)控制,以及整车和系统层面的功能、性能要求和试验方法。
自动控制类标准则以城市道路、公路等不同道路条件以及交通拥堵、事故避让、倒车等不同工况下的应用场景为基础,提出车辆功能要求以及相应的评价方法和指标。
技术路径
智能网联汽车技术逻辑的两条主线是“信息感知”和“决策控制”,据笔者了解,其发展的核心是由系统进行信息感知、决策预警和智能控制,逐渐替代驾驶员的驾驶任务,并最终完全自主执行全部驾驶任务。
1、信息感知
根据信息对驾驶行为的影响和相互关系分为“驾驶相关类信息”和“非驾驶相关类信息”。
驾驶相关类信息包括传感探测类和决策预警类。
非驾驶相关类信息主要包括车载娱乐服务和车载互联网信息服务。
传感探测类又可根据信息获取方式进一步细分为依靠车辆自身传感器直接探测所获取的信息(自身探测)和车辆通过车载通信装置从外部其它节点所接受的信息(信息交互)。
“智能化+网联化”相融合可以使车辆在自身传感器直接探测的基础上,通过与外部节点的信息交互,实现更加全面的环境感知,从而更好地支持车辆进行决策和控制。

2、决策控制
根据车辆和驾驶员在车辆控制方面的作用和职责,分为“辅助控制类”和“自动控制类”,分别对应不同等级的决策控制。
辅助控制类主要指车辆利用各类电子技术辅助驾驶员进行车辆控制,如横向控制和纵向控制及其组合,可分为驾驶辅助(DA)和部分自动驾驶(PA)。
自动控制类则根据车辆自主控制以及替代人进行驾驶的场景和条件进一步细分为有条件自动驾驶(CA)、高度自动驾驶(HA)和完全自动驾驶(FA)。
重点实现的目标
笔者了解到,分阶段建立的智能网联汽车标准体系是依据网联汽车技术现状、产业应用需要和未来发展趋势所制定的。《指南》中构建的具体目标如下:
到2020年,初步建立能够支撑辅助驾驶及低级别自动驾驶的智能网联汽车标准体系。
制定30项以上智能网联汽车重点标准,涵盖功能安全、信息安全、人机界面等通用技术以及信息感知与交互、决策预警、辅助控制等核心功能相关的技术要求和试验方法,促进智能化产品的全面普及与网联化技术的逐步应用。
到2025年,系统形成能够支撑高级别自动驾驶的智能网联汽车标准体系。
制定100项以上智能网联汽车标准,涵盖智能化自动控制、网联化协同决策技术以及典型场景下自动驾驶功能与性能相关的技术要求和评价方法,促进智能网联汽车“智能化+网联化”融合发展,以及技术和产品的全面推广普及。
该文观点仅代表作者,本站仅提供信息存储空间服务,转载请注明出处。若需了解详细的安防行业方案,或有其它建议反馈,欢迎联系我们。
