
介绍了AT89C2051单片机的性能及特点,及以其为核心的一种低成本、高精度、微型化、数字显示的汽车防撞报警器。
该防撞报警器利用超声波及集成霍尔元件实现对汽车的测距和测速,利用单片机的实时控制和数据处理功能,完成系统的控制。文章给出了报警器的硬件电路原理及软件设计。
随着现代生活节奏的加快,交通事故发生的频率也在增加,为提高汽车运行的安全性,本文介绍一种单片机控制的汽车防撞报警系统。该装置将单片机的实时控制及数据处理功能,与超声波的测距技术、传感器技术相结合,可检测汽车运行中后方障碍物与汽车的距离及汽车车速,通过数显装置显示距离,并由发声电路根据距离远近情况发出警告声。
1 超声波测距原理
超声波测距的原理是,通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射超声波和接收到回波的时间差T,然后求出距离S=C×T/2,其中,C为超声波波速,常温下取为344m/s。声速确定后,只要测得超声波往返的时间,即可求得距离。
2 测速原理
汽车车速的测量是通过霍尔集成传感器来实现的。即,将装有永久磁铁的转盘的输入轴与车轮的转轴相连,当车轮转动时,转盘随之转动,此时,转盘上的永久磁铁会经过霍尔集成传感器,从而在霍尔集成传感器的输入端得到一个磁信号,如果转盘不停转动,霍尔集成传感器便会输出转速信号。可以说,对汽车车速的测量实质上是对转速信号的频率的测量。
3 控制器AT89C2051的功能与特点
AT89C2051是一个低功耗、高性能的CMOS8位微处理器,与MCS-51系列指令集和引脚兼容,具有以下特点:128 bytes内部RAM,2Kbytes EPROM,15根I/O线,2个16位定时/计数器,5个两级中断源,1个全双工串行口,一个片内精密模拟比较器和片内振荡器,低功耗的闲置和掉电模式。工作电压范围4.25V~5.5V,工作频率取12MHz。
AT89C2051中的两个16位定时/计数器寄存器T0和T1,作定时器时,可计数机器周期,计数频率为振荡频率的1/12;作计数器时,可对外部输入引脚P3.4/T0和P3.5/T1上出现从1至0的变化时增1,计数频率为振荡频率的1/24。
4 硬件系统设计
该报警器由控制系统、超声波发射电路、接收电路、测速电路、报警电路、LED显示电路组成,电路原理框图见图1。
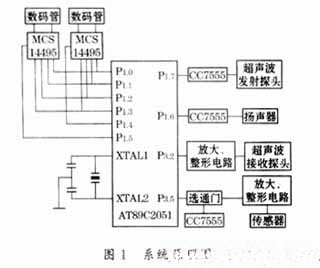

超声波发射电路由CC7555时基电路和超声波发射探头组成。单片机AT89C2051的P1.7引脚控制CC7555时基电路产生40kHz的频率信号给超声波发生器,由超声波探头发射的超声波射向障碍物。利用超声波测距具有以下特点:测量灵敏度高,穿透力强,测量速度快,测量角度大,可对较大范围内的物体进行检测。
超声波接收电路由超声波接收探头、放大器和整形器组成。由障碍物反射回来的超声波经接收探头,变换为电脉冲信号,再由放大器、整形器放大和整形后送入到单片机AT89C2051的P3.2引脚。放大器宜选用有足够增益和较低噪声的宽带放大器,以保持脉冲信号尤其是前沿不发生畸变,提高测距的精度。
测速电路由传感器、脉冲放大器、整形器、CC7555时基信号电路、选通门组成。霍尔集成传感器将车轮转速信号变成脉冲信号输出,经放大、整形电路后送入选通门,由CC7555时基电路产生的单位时基信号控制选通门的开与闭,以控制转速信号在单位时间内通过选通门,送入单片机AT89C2051的P3.5引脚,控制T1计数器计数,实现了在单位时间内的计数。
报警电路由CC7555电路和扬声器组成。AT89C2051的P1.6控制CC7555电路根据测量结果,产生一定频率的信号驱动扬声器发出报警声。在扬声器发出报警声时,时基电路CC7555处于暂稳态,此时电源向电容充电,从而使CC7555结束暂稳态回复到稳定状态,输出低电平,使扬声器停止发出报警声,直到下一次测距结束产生新的报警声。
LED显示电路由数码管和驱动电路组成。用两个数码管显示距离,数码管采用静态显示,由芯片MCS14495驱动显示,P1.4、P1.5分别作为驱动芯片MCS14495的锁存信号,用于控制产生的BCD(BinaryCode Decimal,二进制编码表示的十进制数)码是显示高位还是低位。
控制器AT89C2051主要完成程序的执行、数据的处理和对外部电路的实时控制。内部定时器T0工作在定时方式,T0在超声波发射时开始计数,当P3.2引脚收到回波后,停止计数,T0所计时间即为超声波往返传输时间,单片机对该数据进行处理,即可测出距离。内部定时器T1工作在计数方式,由P3.5引脚输入的脉冲信号控制T1计数,由T1所计数值确定汽车的转速。
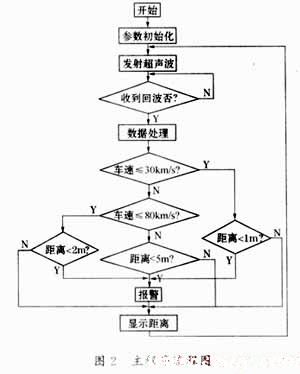
单片机根据所测距离和车速进行比较,判断是否驱动报警电路报警,如设定:当车速小于等于30km/s时,安全距离应大于等于1m;当车速小于等于80km/s时,安全距离应大于等于2m;当车速大于80km/s时,安全距离应大于等于5m。
5 软件设计
本装置的控制软件要完成系统的初始化,控制触发脉冲信号的发射与接收,根据定时时间计算障碍物的距离,根据计数频率计算汽车车速,判断所测距离是否在车速所对应的安全范围内,并根据计算和判断结果产生BCD码和相应频率的脉冲信号,以驱动显示电路和发声电路。实现整个系统功能的主流程图如图2所示。
6 结束语
本文介绍的汽车报警器,利用单片机AT89C2051作为报警装置的控制器,能充分发挥AT89C2051的数据处理和实时控制功能,使系统工作于最佳状态,提高系统的灵敏度。该报警器基于单片机设计,从而具有体积小、使用方便的特点。若将安全距离设为0.5m,就可作为汽车倒车报警器,提高汽车倒车时的安全性。
参考文献
1 宋建国.AVR单片机原理及应用.北京:北京航空航天大学出版社,1998
2 黄继昌.传感器工作原理及应用实例.北京:人民邮电出版社,1998

该文观点仅代表作者,本站仅提供信息存储空间服务,转载请注明出处。若需了解详细的安防行业方案,或有其它建议反馈,欢迎联系我们。
